Self-Navigating Robot (EE Proj.)

Abstract
This is the team project for the course UESTC 3010: Team Design and Project Skills (TDPS) of my Senior Year(2023.3-2023.6) in university.
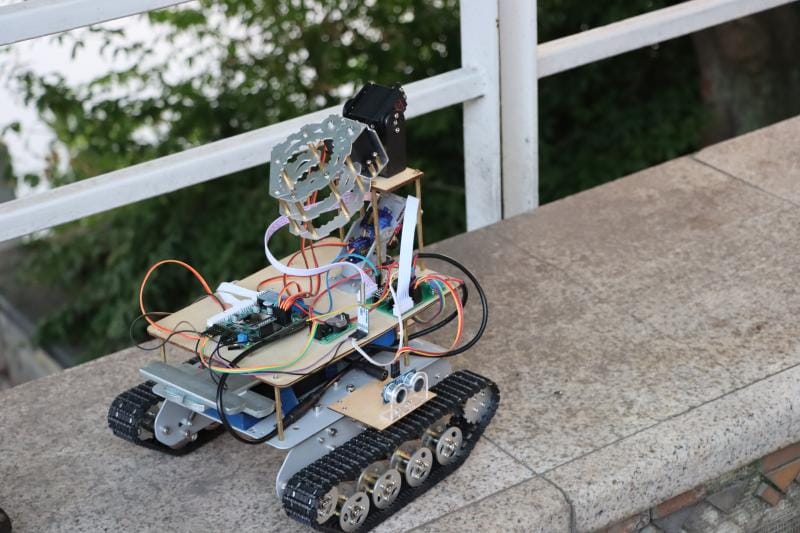
This robot was designed to navigate itself to finish 6 tasks in two patios, three tasks in each patio in one go.
This website explains the functions of the automatic car and the tasks it done, as well as my contributions to this project.
Overview
There are two patios and i am in charge of patio two.
As the main contributor of three tech developers in a team of 10 persons, in the tech design and implementations. are the contributors of the Software Development, integration and .
- Main contributor as Navigation and Vision Developer. Facilitated efficient collaboration and effectively distributed tasks within a 10-member team across all stages of design, development, and implementation. Designed and developed a sophisticated Navigation Module on embedded systems integral for the robot's general navigation and line tracking capabilities. Enabled robust path following along brick lines utilizing computer vision techniques and control algorithms. Engineered a communication protocol to manage the inter-module UART data transmission. Led rigorous on-site testing and debugging sessions, playing a crucial role in continuously enhancing system performance and reliability throughout the project's progression.
- Skills: Software Development · Computer Vision · Project Management
GitHub - RincoYu/Navigation-Module-for-TDPS: The navigation module for the smart vehicle project. The hardware used for this code is OpenMV H7 plus.
The navigation module for the smart vehicle project. The hardware used for this code is OpenMV H7 plus. - RincoYu/Navigation-Module-for-TDPS